例程讲解10-Color-Tracking->ir_beacon_grayscale_trackingIR灰度跟踪
import sensor, image, time
thresholds = (255, 255)
sensor.reset()
sensor.set_pixformat(sensor.GRAYSCALE)
sensor.set_framesize(sensor.VGA)
sensor.set_windowing((240, 240))
sensor.skip_frames(time = 2000)
sensor.set_auto_gain(False)
sensor.set_auto_whitebal(False)
clock = time.clock()
while(True):
clock.tick()
img = sensor.snapshot()
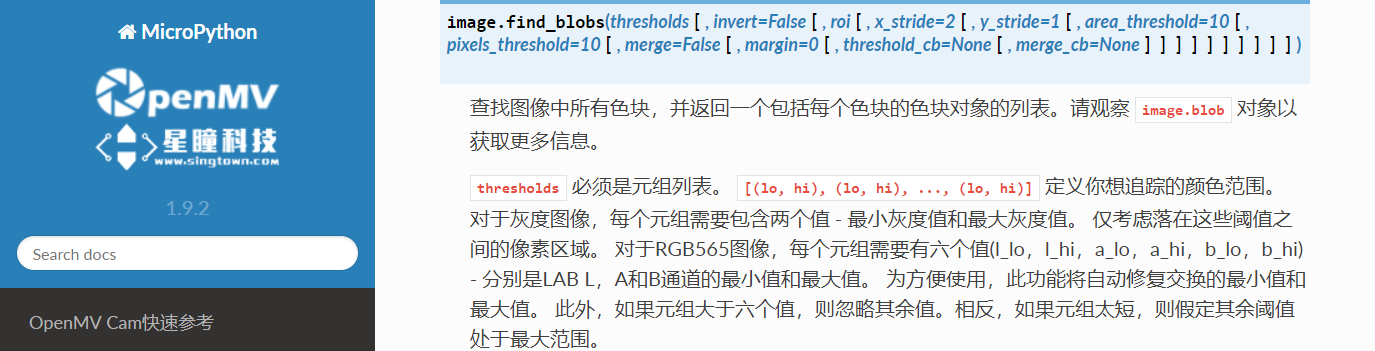
for blob in img.find_blobs([thresholds], pixels_threshold=200, area_threshold=200, merge=True):
ratio = blob.w() / blob.h()
if (ratio >= 0.5) and (ratio <= 1.5):
img.draw_rectangle(blob.rect())
img.draw_cross(blob.cx(), blob.cy())
print(clock.fps())
星瞳科技OpenMV官方中文文档函数讲解: