例程讲解10-Color-Tracking->multi_color_blob_tracking多颜色跟踪
import sensor, image, time, math
thresholds = [(30, 100, 15, 127, 15, 127),
(30, 100, -64, -8, -32, 32),
(0, 15, 0, 40, -80, -20)]
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(time = 2000)
sensor.set_auto_gain(False)
sensor.set_auto_whitebal(False)
clock = time.clock()
while(True):
clock.tick()
img = sensor.snapshot()
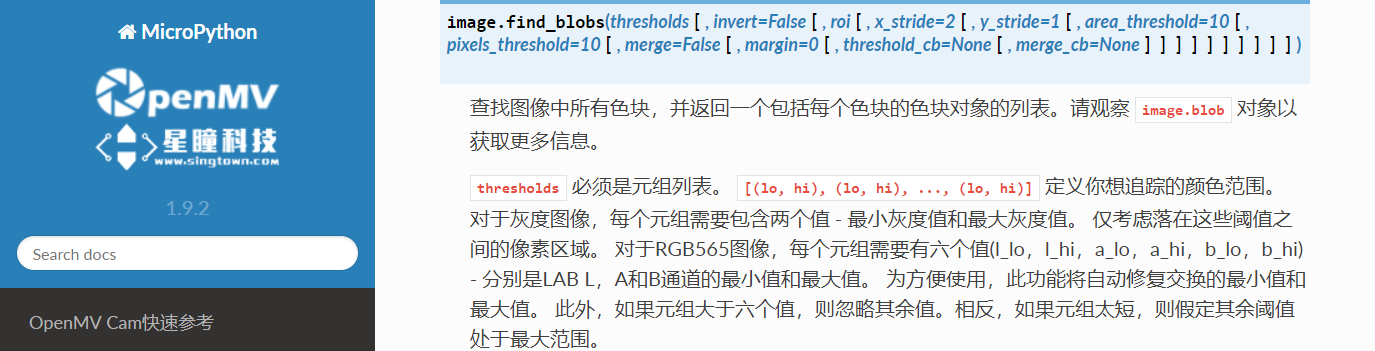
for blob in img.find_blobs(thresholds, pixels_threshold=200, area_threshold=200):
if blob.elongation() > 0.5:
img.draw_edges(blob.min_corners(), color=(255,0,0))
img.draw_line(blob.major_axis_line(), color=(0,255,0))
img.draw_line(blob.minor_axis_line(), color=(0,0,255))
img.draw_rectangle(blob.rect())
img.draw_cross(blob.cx(), blob.cy())
img.draw_keypoints([(blob.cx(), blob.cy(), int(math.degrees(blob.rotation())))], size=20)
print(clock.fps())
星瞳科技OpenMV官方中文文档函数讲解: