分辨不同人脸
视频教程19 - 分辨不同人脸:https://singtown.com/learn/50033/
本节分享一下使用LBP特征分辨不同的人脸。
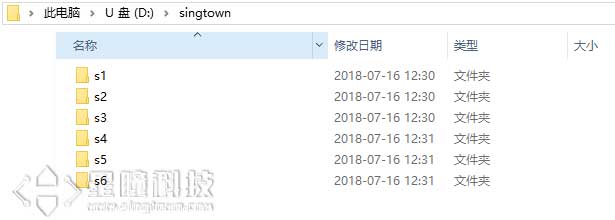
我们需要先建立自己的图像库。我们先在OpenMV的U盘(注意一定要插sd卡)中新建一个文件夹,命名为singtown,然后在singtown文件夹中再新建n个名为s1,s2,s3...sn的子文件夹,其中n为整个图像库中的人数。如下图:
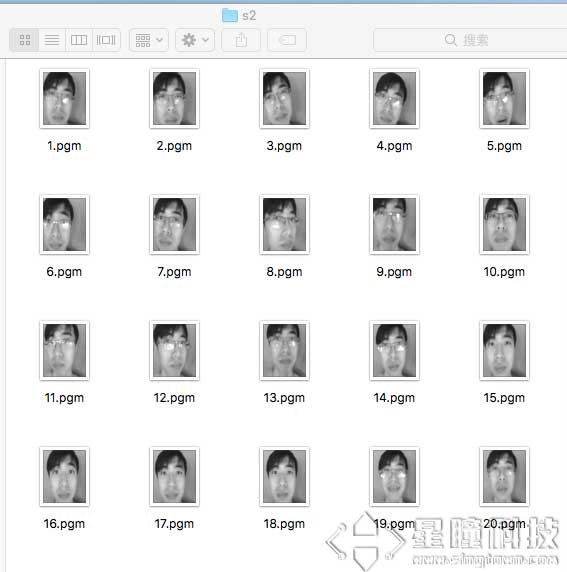
然后,我们可以运行以下代码来采集不同的人脸样本。注意采集时尽量让背景均匀,并且让人脸尽量充满整个画面。人脸可以微笑,不笑,正脸,歪头,戴眼镜,不戴眼镜等。可以选择每人10-20张图片。
# Snapshot Example
#
# Note: You will need an SD card to run this example.
#
# You can use your OpenMV Cam to save image files.
import sensor, image, machine
#import pyb
RED_LED_PIN = 1
BLUE_LED_PIN = 3
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.GRAYSCALE) # or sensor.GRAYSCALE
sensor.set_framesize(sensor.B128X128) # or sensor.QQVGA (or others)
sensor.set_windowing((92,112))
sensor.skip_frames(10) # Let new settings take affect.
sensor.skip_frames(time = 2000)
num = 1 #设置被拍摄者序号,第一个人的图片保存到s1文件夹,第二个人的图片保存到s2文件夹,以此类推。每次更换拍摄者时,修改num值。
n = 20 #设置每个人拍摄图片数量。
#连续拍摄n张照片,每间隔3s拍摄一次。
while(n):
#红灯亮
machine.LED("LED_RED").on()
#pyb.LED(RED_LED_PIN).on()
sensor.skip_frames(time = 3000) # Give the user time to get ready.等待3s,准备一下表情。
#红灯灭,蓝灯亮
machine.LED("LED_RED").off()
machine.LED("LED_BLUE").on()
#pyb.LED(RED_LED_PIN).off()
#pyb.LED(BLUE_LED_PIN).on()
#保存截取到的图片到SD卡
print(n)
sensor.snapshot().save("singtown/s%s/%s.pgm" % (num, n) ) # or "example.bmp" (or others)
n -= 1
#pyb.LED(BLUE_LED_PIN).off()
machine.LED("LED_BLUE").off()
print("Done! Reset the camera to see the saved image.")
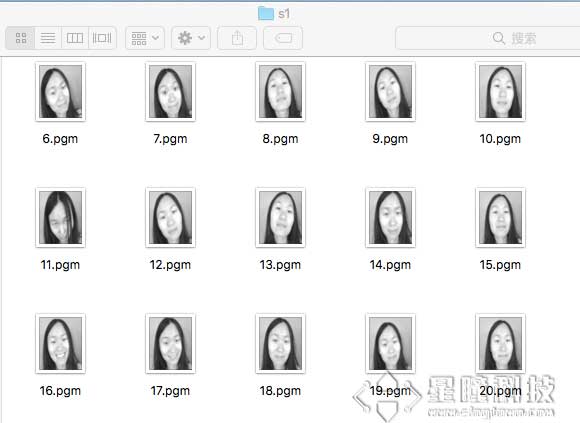
拍摄结束后OpenMV U盘中图像如下(注意每次OpenMV u盘写入新图像/文件后需要重置OpenMV才可以看到):
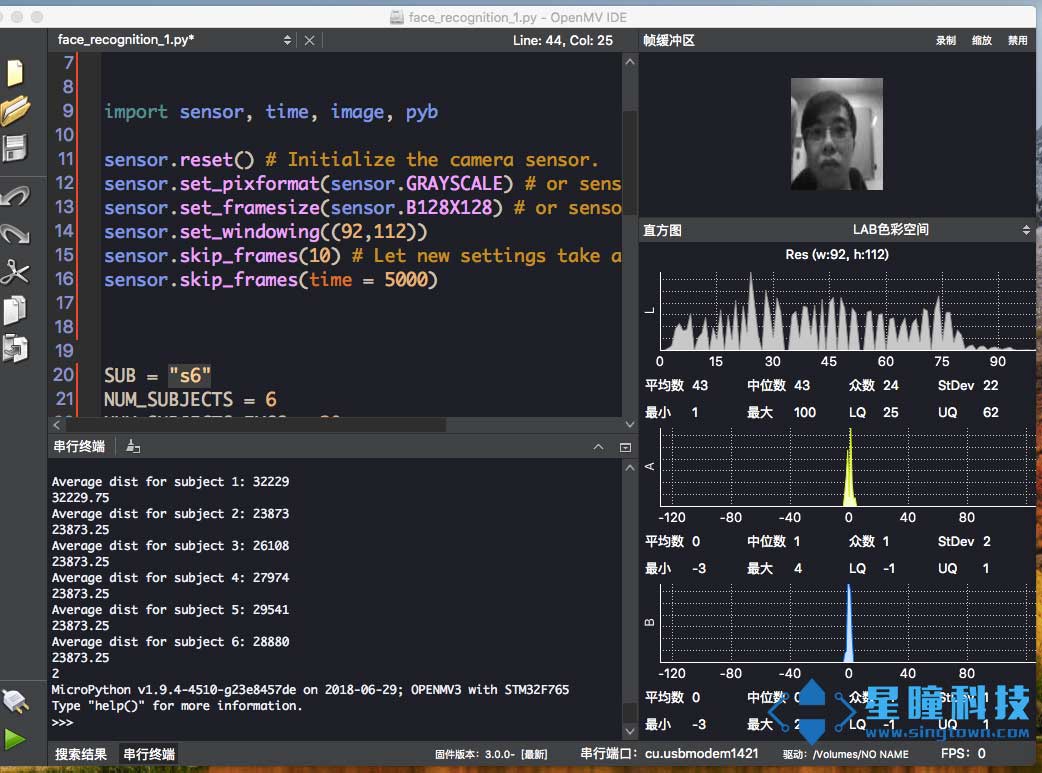
最后,我们运行以下代码,来识别当前摄像头视野内的人脸,并输出与当前对象最匹配的人。
# Face recognition with LBP descriptors.
# See Timo Ahonen's "Face Recognition with Local Binary Patterns".
#
# Before running the example:
# 1) Download the AT&T faces database http://www.cl.cam.ac.uk/Research/DTG/attarchive/pub/data/att_faces.zip
# 2) Exract and copy the orl_faces directory to the SD card root.
import sensor, time, image
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.GRAYSCALE) # or sensor.GRAYSCALE
sensor.set_framesize(sensor.B128X128) # or sensor.QQVGA (or others)
sensor.set_windowing((92,112))
sensor.skip_frames(10) # Let new settings take affect.
sensor.skip_frames(time = 5000) #等待5s
#SUB = "s1"
NUM_SUBJECTS = 6 #图像库中不同人数,一共6人
NUM_SUBJECTS_IMGS = 20 #每人有20张样本图片
# 拍摄当前人脸。
img = sensor.snapshot()
#img = image.Image("singtown/%s/1.pgm"%(SUB))
d0 = img.find_lbp((0, 0, img.width(), img.height()))
#d0为当前人脸的lbp特征
img = None
pmin = 999999
num=0
def min(pmin, a, s):
global num
if a<pmin:
pmin=a
num=s
return pmin
for s in range(1, NUM_SUBJECTS+1):
dist = 0
for i in range(2, NUM_SUBJECTS_IMGS+1):
img = image.Image("singtown/s%d/%d.pgm"%(s, i))
d1 = img.find_lbp((0, 0, img.width(), img.height()))
#d1为第s文件夹中的第i张图片的lbp特征
dist += image.match_descriptor(d0, d1)#计算d0 d1即样本图像与被检测人脸的特征差异度。
print("Average dist for subject %d: %d"%(s, dist/NUM_SUBJECTS_IMGS))
pmin = min(pmin, dist/NUM_SUBJECTS_IMGS, s)#特征差异度越小,被检测人脸与此样本更相似更匹配。
print(pmin)
print(num) # num为当前最匹配的人的编号。
运行结果如图: