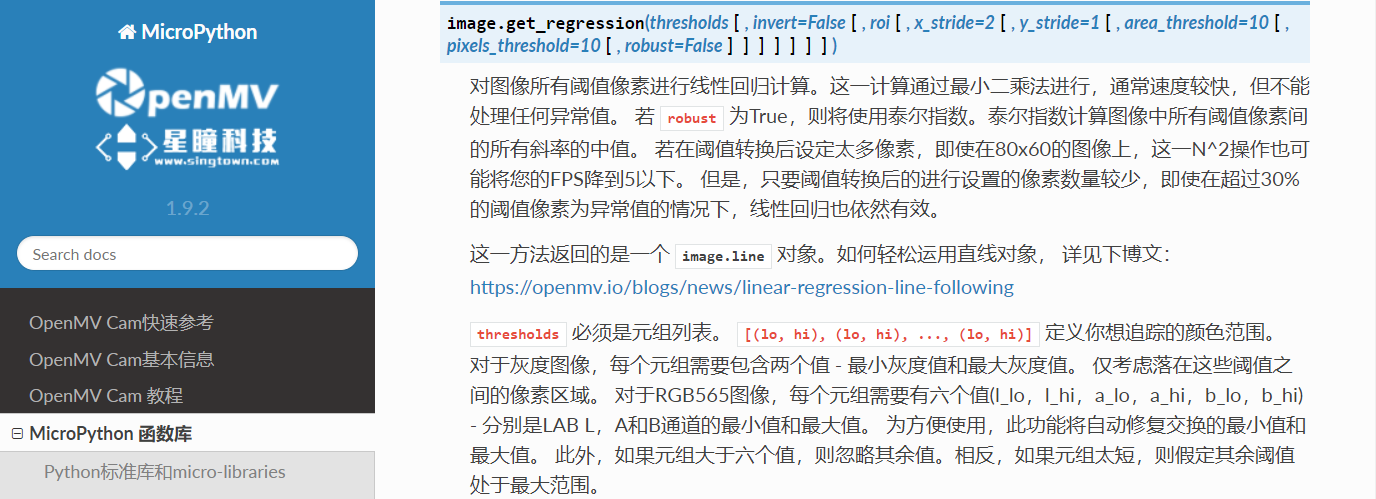
Routine explanation -09-linear_regression_fast Fast Linear regression (linear regression)
Video tutorial 20 - Line patrol car: https://singtown.com/learn/50037/
This example shows the use of the get_regression() method on the OpenMV Cam to obtain the linear regression of the ROI. Using this method, it is easy to make the robot track all lines pointing in the same general direction.
This routine can be used for robot line patrol, and the effect is very good.
# 快速线性回归(巡线)例程
#
# 这个例子展示了如何在OpenMV Cam上使用get_regression()方法来获得
# ROI的线性回归。 使用这种方法,你可以轻松地建立一个机器人,它可以
# 跟踪所有指向相同的总方向但实际上没有连接的线。 在线路上使用
# find_blobs(),以便更好地过滤选项和控制。
#
# 这被称为快速线性回归,因为我们使用最小二乘法来拟合线。然而,这种方法
# 对于任何具有很多(或者甚至是任何)异常点的图像都是不好的,
# 这会破坏线条拟合.
#设置阈值,(0,100)检测黑色线
THRESHOLD = (0, 100) # Grayscale threshold for dark things...
#设置是否使用img.binary()函数进行图像分割
BINARY_VISIBLE = True # 首先执行二进制操作,以便您可以看到正在运行的线性回归...虽然可能会降低FPS。
import sensor, image, time
sensor.reset()
sensor.set_pixformat(sensor.GRAYSCALE)
sensor.set_framesize(sensor.QQVGA)
sensor.skip_frames(time = 2000)
clock = time.clock()
while(True):
clock.tick()
img = sensor.snapshot().binary([THRESHOLD]) if BINARY_VISIBLE else sensor.snapshot()
# Returns a line object similar to line objects returned by find_lines() and
# find_line_segments(). You have x1(), y1(), x2(), y2(), length(),
# theta() (rotation in degrees), rho(), and magnitude().
#
# magnitude() represents how well the linear regression worked. It goes from
# (0, INF] where 0 is returned for a circle. The more linear the
# scene is the higher the magnitude.
# 函数返回回归后的线段对象line,有x1(), y1(), x2(), y2(), length(), theta(), rho(), magnitude()参数。
# x1 y1 x2 y2分别代表线段的两个顶点坐标,length是线段长度,theta是线段的角度。
# magnitude表示线性回归的效果,它是(0,+∞)范围内的一个数字,其中0代表一个圆。如果场景线性回归的越好,这个值越大。
line = img.get_regression([(255,255) if BINARY_VISIBLE else THRESHOLD])
if (line): img.draw_line(line.line(), color = 127)
print("FPS %f, mag = %s" % (clock.fps(), str(line.magnitude()) if (line) else "N/A"))
# About negative rho values:
# 关于负rho值:
#
# A [theta+0:-rho] tuple is the same as [theta+180:+rho].
# A [theta+0:-rho]元组与[theta+180:+rho]相同
If you want to make a patrol car, just use the theta return value of the line object obtained by this program (theta represents the Angle of the return line segment), and use theta to control the Angle of the car.
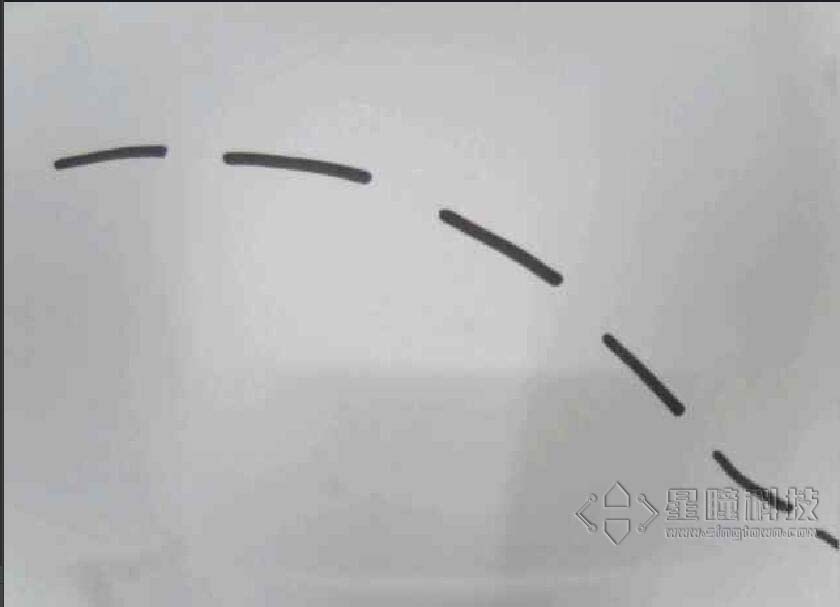
original image:\
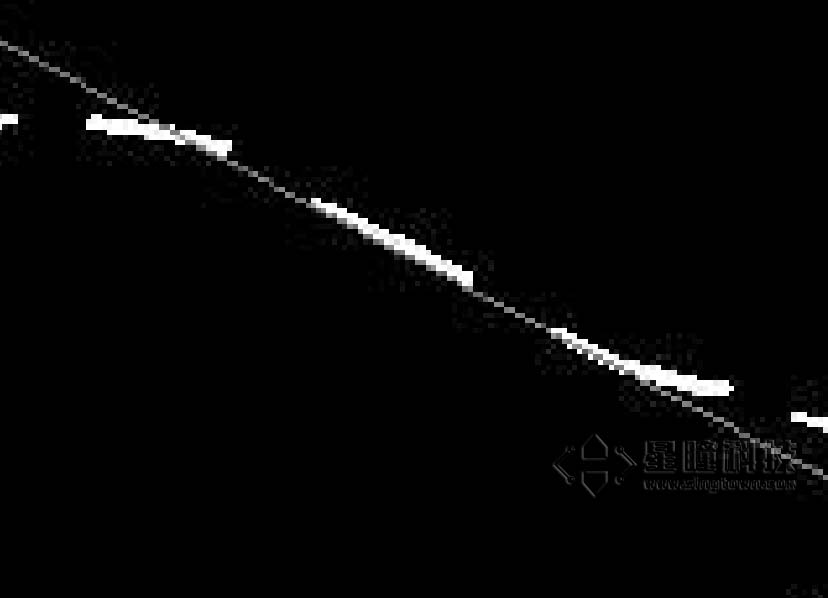
Running effect diagram:\
Singtown Technology OpenMV official Chinese document function explanation: