RobotArm OpenMV 机械臂 — 硬件概述
1. 简介
RobotArm(OpenMV 机械臂)是一款面向竞赛、DIY 与教育的机械臂平台,适用于机器人控制、计算机视觉与自动化编程教学。硬件采用模块化设计,包含多个 PCB 板与可替换夹具,便于扩展与维护。
淘宝产品购买 星瞳OpenMV官方机械臂:星瞳科技 OpenMV品牌店
项目代码库:OpenMV-Robot-Arm-Project
星瞳科技OpenMV官方机械臂视频教程:从零开始:Robot Arm机械臂快速上手
星瞳科技OpenMV官方机械臂视频教程:Robot Arm物块码垛实战
星瞳科技OpenMV官方机械臂视频教程:Robot Arm三子棋人机对战
星瞳科技OpenMV官方机械臂视频教程:24年电赛E题三子棋游戏装置
星瞳科技OpenMV官方机械臂视频教程:垃圾分类-自行训练AI目标检测
星瞳科技OpenMV官方机械臂视频教程:按键示教及路径规划
2. 整体结构
整体主要由三部分组成:ESP32 机械臂主板、OpenMV 机械臂扩展板 与 按键 LCD 扩展板。机械臂主体采用轻量化结构,配合步进电机/舵机实现高精度运动,适合教学,DIY与实验场景。
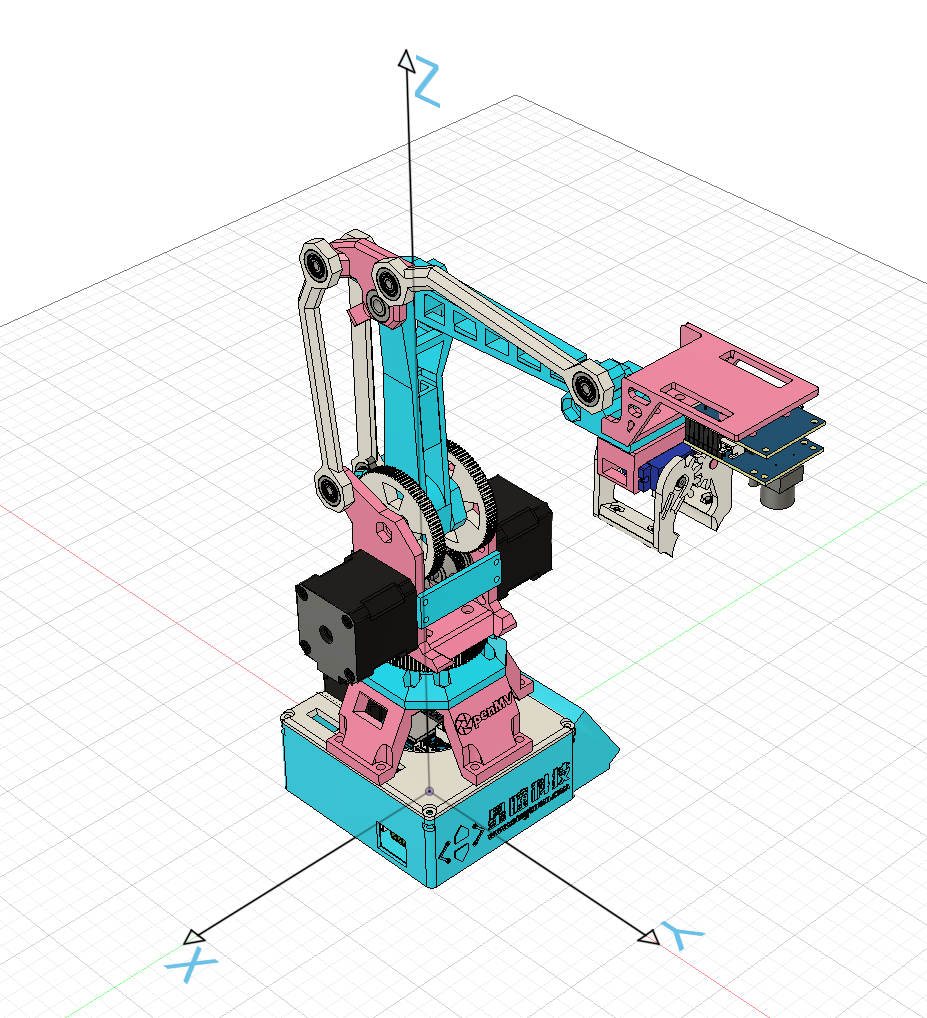
机械臂整体结构和坐标示意
机械臂遵循空间直角坐标系,坐标原点为三轴的相交点
主要特点
- 模块化 PCB 设计,便于调试与替换
- 多种夹具支持不同抓取需求(常规、加长、电磁)
- 提供视觉识别与本地控制结合的实验平台
3. 硬件组成
- ESP32 机械臂主板
ESP32 主板基于 ESP32-S3 微控制器,负责解析串口 Gcode 命令、控制各轴电机,并对外提供驱动、电源、串口与继电器接口。
- 主要功能:运动控制、通信解析、驱动与电源管理
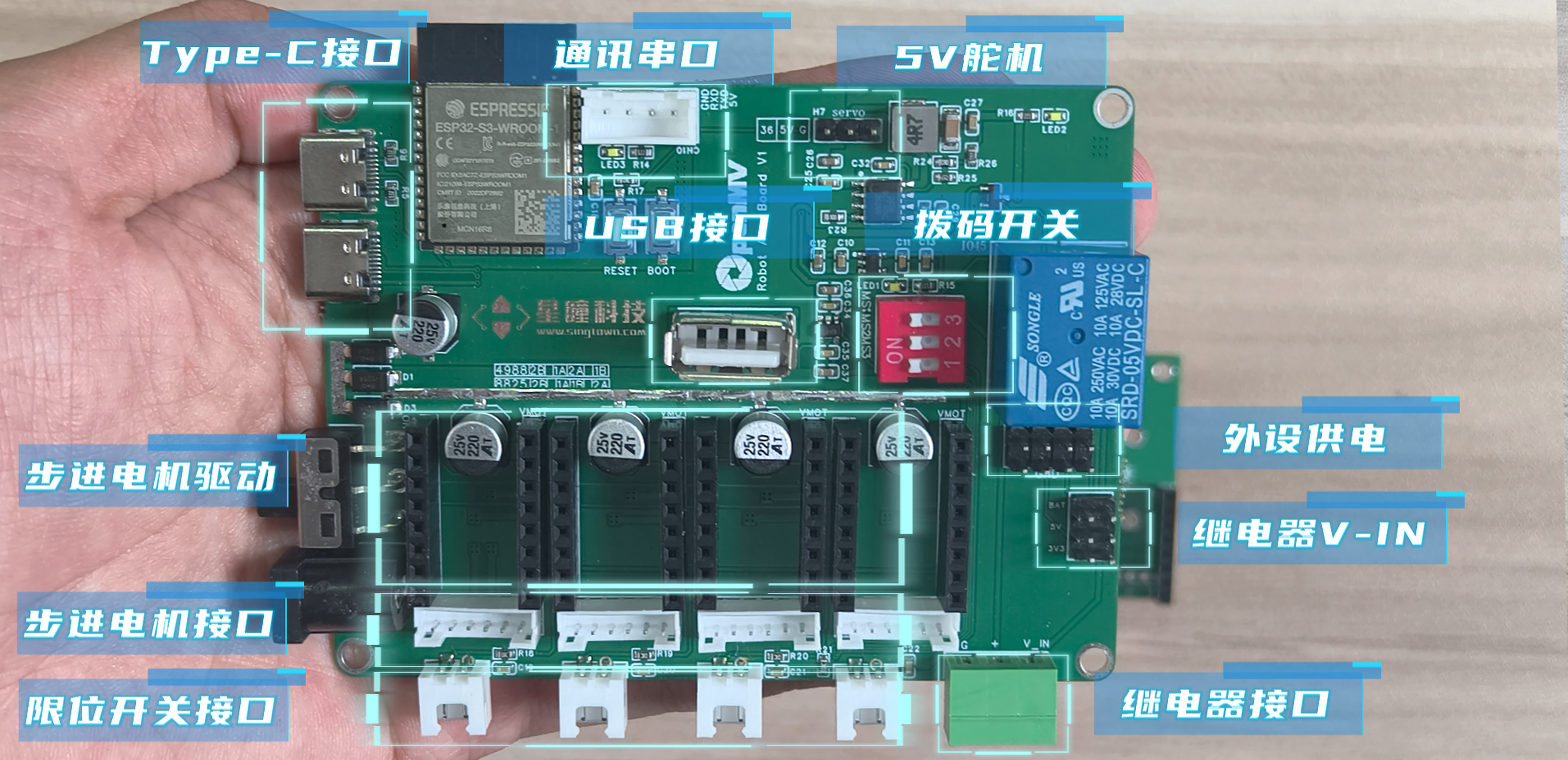
端口功能介绍
通讯串口接口:和OpenMV 机械臂扩展板连接,主要负责OpenMV和机械臂之间的信息传输;5V舵机接口:用于连接舵机,主要作用是控制舵机,进而控制夹具的开合;外设供电接口:预留的5V和3.3V供电排针,当有其他外设或者传感器需要供电时,无需再加电源模块,可以直接使用主板电源;拨码开关:可以通过此开关调整驱动的细分,控制步进电机的步距;TypeC接口(上):用于机械臂主板的固件烧录和调试(一般用不到);TypeC接口(下)和USB接口:二者配合使用,USB连接OpenMV,TypeC连接PC,即可实现OpenMV的TypeC接口调试,即主板内置一个TpyeC-USB的转换器;也可以不使用,OpenMV主板的usb接口直接连接usb数据线到电脑步进电机:使用常见的四线两相42步进电机。相位为:AXBAXB驱动:使用A4988步进电机驱动;继电器:继电器V_IN可以设置继电器的输入电压,使用跳线帽短接即可(注意:只能一次性短接一个输入电压,短接多个会烧毁主板),当有其余电压需求时,可以通过IN口输入自定义电压,此时不用接跳线帽。
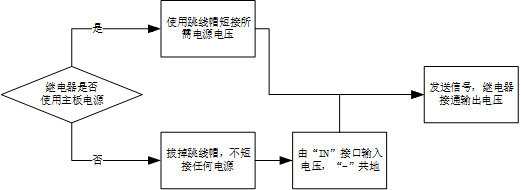
继电器使用方法
- OpenMV 机械臂扩展板
扩展板用于连接 OpenMV 摄像头与 ESP32 主板,转发视觉模块与主控之间的通信,同时提供舵机与 5V 外设接口,供 OpenMV 控制外设操作。
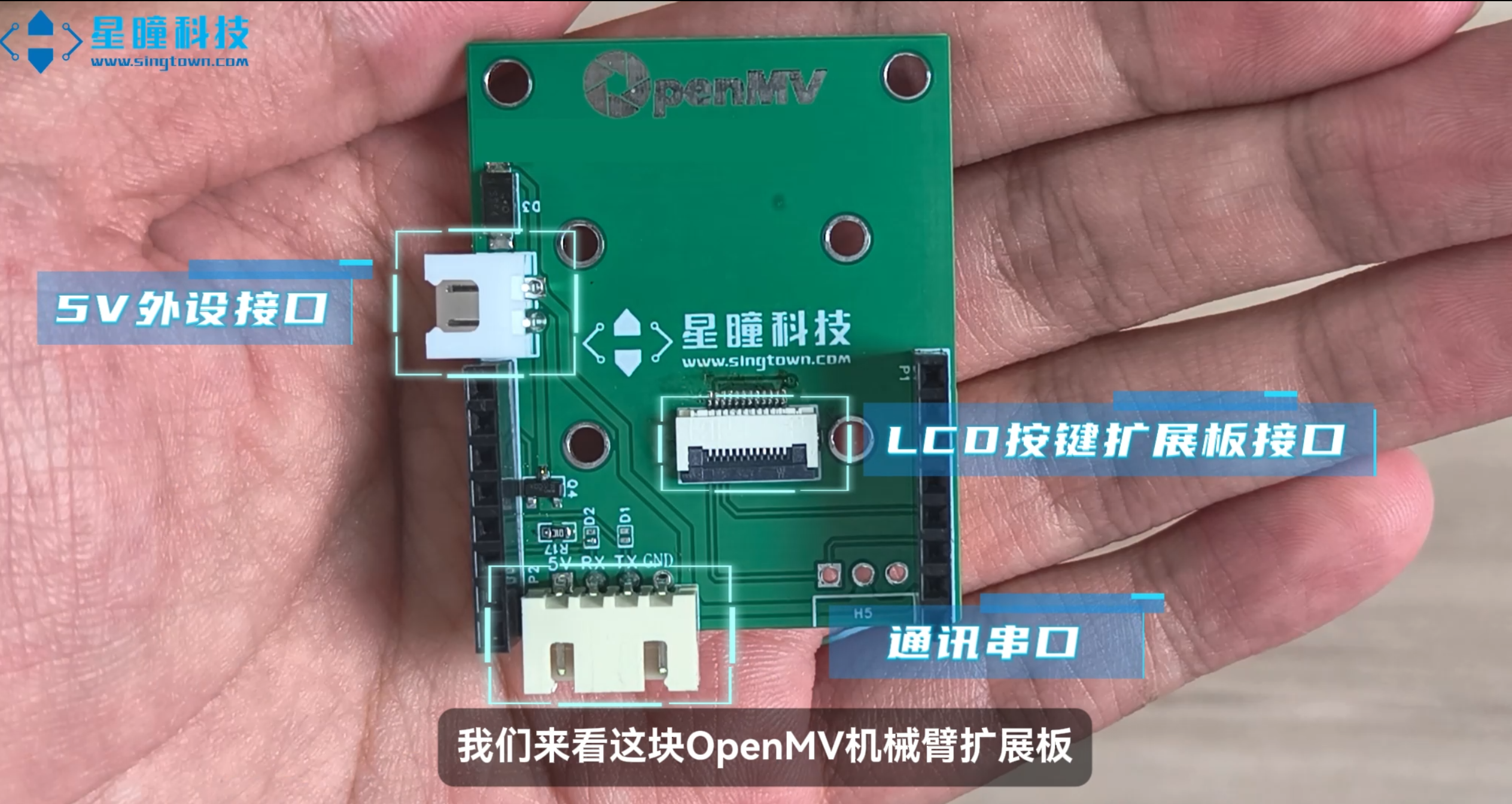
5V外设接口:可以外接激光笔、电磁铁等较高功率器件,并且可以使用OpenMV控制开关;LCD按键扩展板接口:用于连接按键 LCD 扩展板,传输按键信号和LCD信号;舵机接口:可以驱动5V供电的舵机,直接由OpenMV控制;通讯串口接口:连接ESP32 机械臂主板,传输串口信号,主要负责OpenMV和机械臂之间的信息传输;
端口功能介绍
- 按键 LCD 扩展板
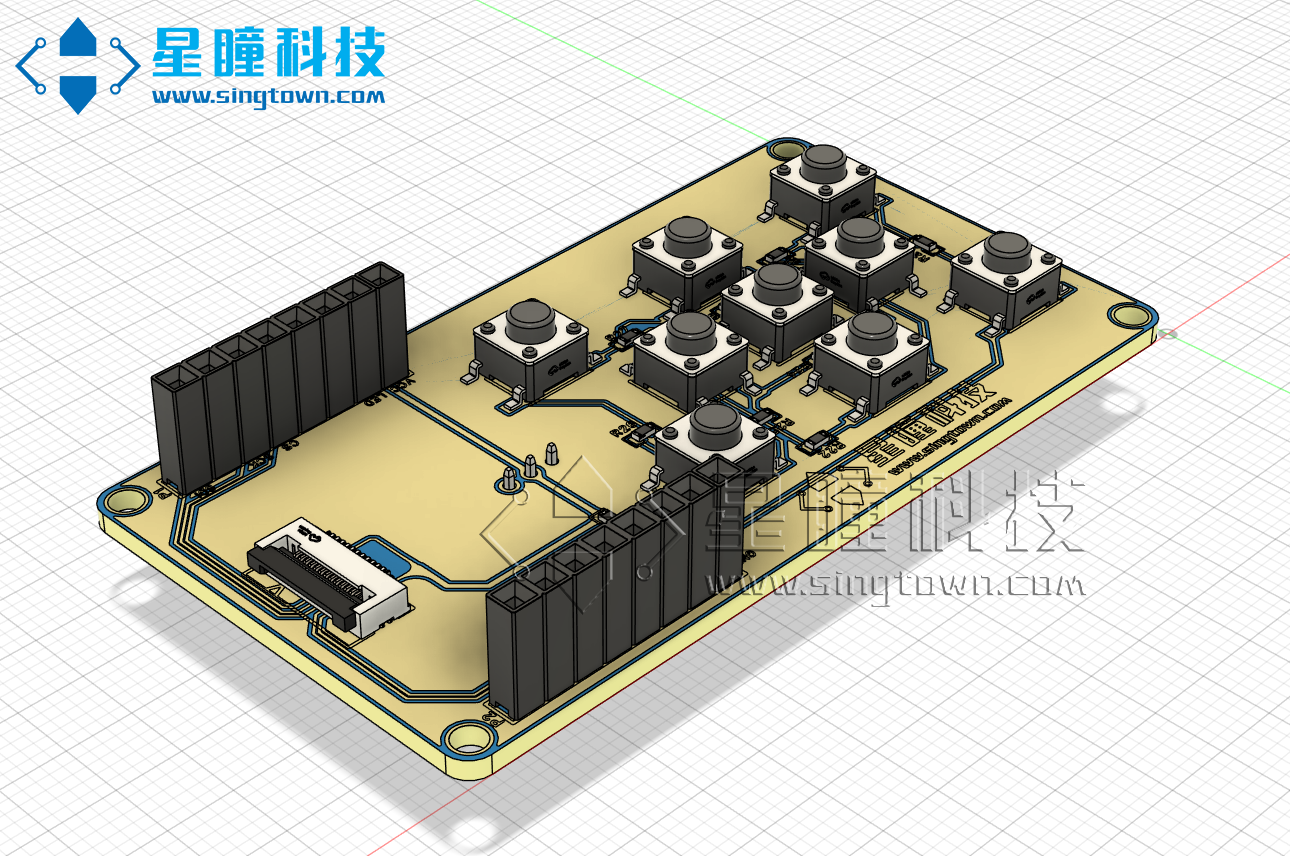
按键 LCD 扩展板负责人机交互,包含显示屏与按键,可用于状态显示、模式切换与本地操作(如复位、轴运动、夹具开合等)。
4. 夹具系统
机械臂随附三种常用夹具,以适应不同应用场景:
- 正常尺寸夹具
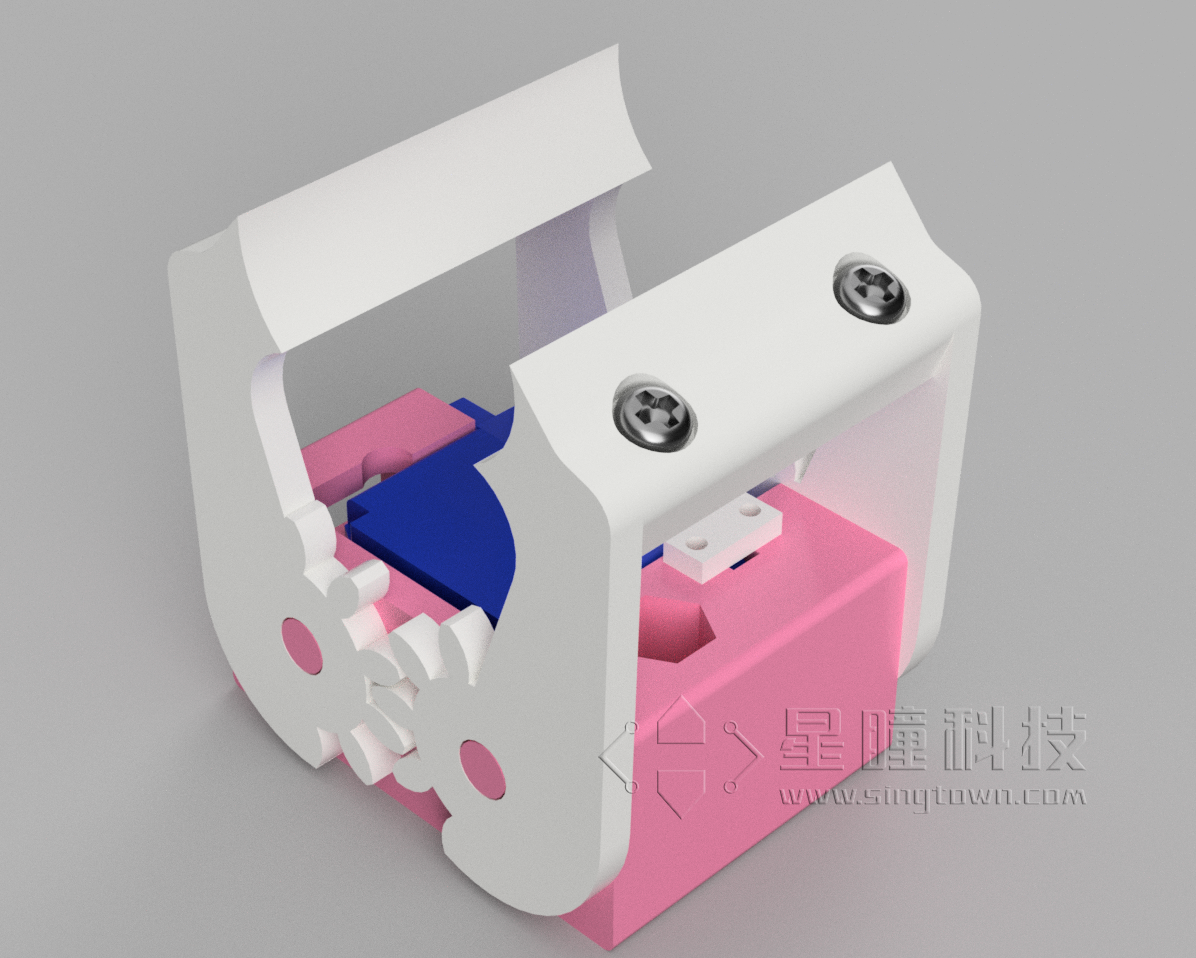
用途:基础物体抓取、码垛等常规任务。
- 加长夹具
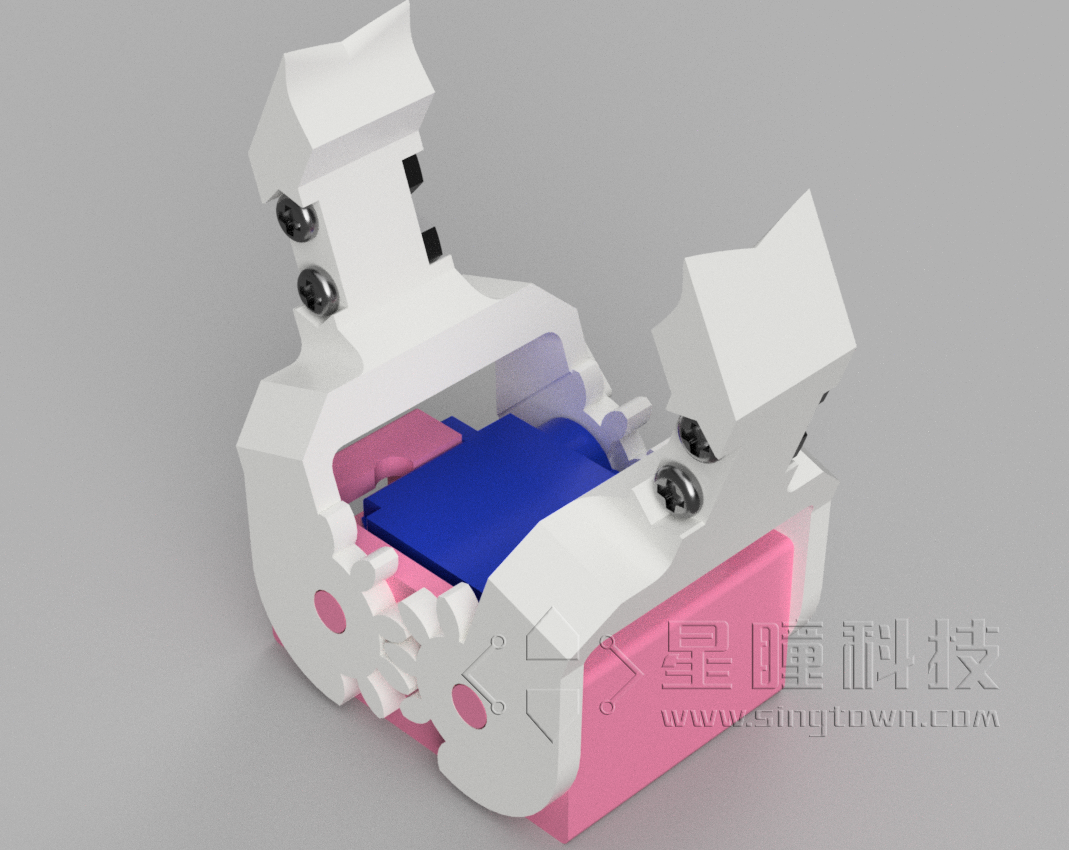
用途:适用于细小物体或深孔 / 受限空间的抓取操作。
- 电磁铁夹具
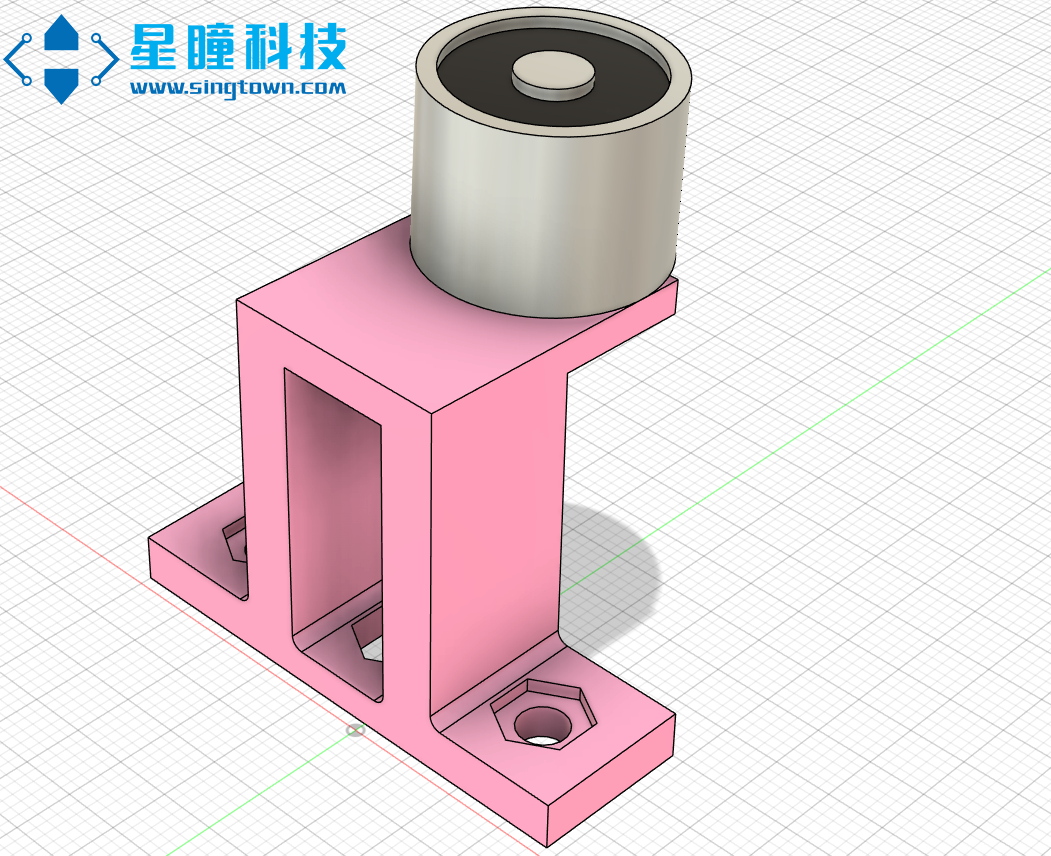
用途:用于抓取金属类物体
5. LCD 与按键系统
- LCD 显示屏

显示内容包括机械臂状态、图像预览与操作提示,方便教学演示与调试。
- 按键系统
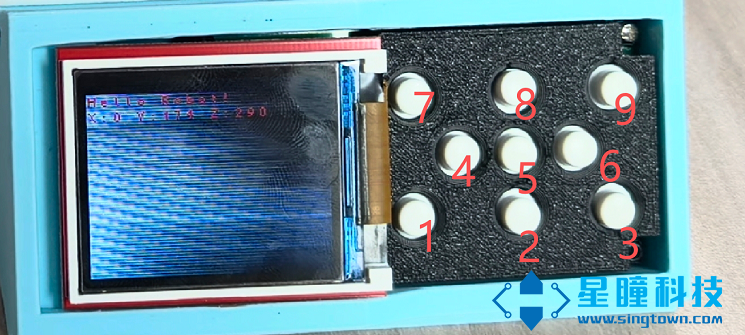
按键编号 0-9,功能可自定义(例如:复位、抓取、释放、模式切换等),便于本地快速控制。
6. 其他配件与教学组件
- 码垛组件
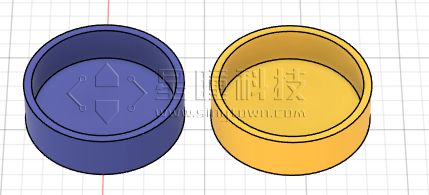
目标圆框:蓝色 ×1、黄色 ×1,作为码垛目标区域。配套的码垛物块示例:

- 蓝色方块 ×3
- 黄色方块 ×3
- 蓝色圆形 ×3
黄色圆形 ×3
三子棋组件
棋盘:1 个

棋子:白色 ×5、黑色 ×5
- 垃圾分类组件
- 垃圾桶:可回收、有害、其他、厨余(四类)

- 示例物品:玻璃瓶(可回收)、废旧电池(有害)、烟蒂(其他)、柠檬(厨余),用于演示垃圾分类任务
7. 技术参数
7.1 机械结构
机械臂为 3-DOF(三自由度)关节型机械臂,全部结构件均为 3D 打印件。
┌─── 末端执行器(夹爪/吸盘/电磁铁)
│
┌────┴────┐
│ 上 臂 │ — 120mm(小臂)
└────┬────┘
│
┌────┴────┐
│ 下 臂 │ — 120mm(大臂)
└────┬────┘
│
┌────┴────┐
│ 旋转底座 │ — 绕 Z 轴 360° 旋转
└────┬────┘
│
┌────┴────┐
│ 固定底座 │
└─────────┘
各部件尺寸
| 部件 | 尺寸 |
|---|---|
| 下臂(大臂)LOW_SHANK | 120 mm |
| 上臂(小臂)HIGH_SHANK | 120 mm |
| 末端偏移(上臂轴承到夹爪中心)END_EFFECTOR_OFFSET | 54 mm |
| 底座高度 BASE_HEIGHT(桌面到旋转输出轴中心) | 170 mm |
底座结构
底座由固定底座和旋转底座两部分组成:
- 固定底座:安装于桌面,整机支撑基础,内部容纳控制板和电源接口
- 旋转底座:搭载下臂安装座,内置轴承,绕 Z 轴 360° 旋转。旋转底座输出轴为运动学工作原点
坐标系统一以桌面为 Z=0 基准,末端到桌面的绝对高度 = BASE_HEIGHT (170mm) + Z 坐标值。
7.2 传动方式
三个关节均采用 GT2 同步带减速传动:
电机轴 — 20齿小带轮 → GT2 同步带 → 关节轴 — 90齿大带轮
减速比 = 90 / 20 = 4.5 : 1
| 参数 | 值 |
|---|---|
| 小带轮齿数 | 20T |
| 大带轮齿数 | 90T |
| 减速比 | 4.5 : 1 |
| 同步带类型 | GT2 同步带 |
电机转 4.5 圈 → 关节转 1 圈,扭矩放大 4.5 倍。
7.3 电机系统
步进电机 — NEMA17
| 项目 | 值 |
|---|---|
| 电机型号 | NEMA17(42 步进电机) |
| 步距角 | 1.8° |
| 步数/圈 | 200 步 |
| 微步设置 | 16 细分 |
| 驱动芯片 | A4988 |
| 细分后步数/圈 | 3,200 步 |
| 经减速后步数/圈 | 14,400 步/转 |
| 角度分辨率 | 0.025°/步 |
三个电机的分工
| 轴 | 控制对象 | 说明 |
|---|---|---|
| X 轴 | 上臂(小臂)运动 | 控制上臂俯仰 |
| Y 轴 | 下臂(大臂)运动 | 控制下臂俯仰 |
| Z 轴 | 底座旋转运动 | 控制整机绕 Z 轴水平旋转 |
7.4 末端执行器(可更换)
| 执行器类型 | 控制方式 | 用途场景 |
|---|---|---|
| 9G 舵机夹爪(默认) | PWM 控制 | 抓取轻量物块 |
| 气泵吸盘(选配) | 开关量控制 | 吸盘吸附抓取 |
| 电磁铁(选配) | 开关量控制 | 抓取铁质物块(三子棋) |
| 激光头(选配) | 开关量控制 | 定位指示 |
| LED 指示灯 | 自动闪烁 | 系统运行状态指示 |
舵机夹爪参数
| 参数 | 值(参考) |
|---|---|
| 夹紧角度 | 90° |
| 松开角度 | 0° |
| 舵机型号 | SG90 或 MG996 |
7.5 控制板硬件架构
OpenMV H7 / H7 Plus(视觉主控)
│
│ UART 串口(GCode 协议)
▼
┌──────────────────────────────────┐
│ 运动控制主控 │ ← 解析 GCode 指令
│ (ESP32-S3) │ 逆运动学计算
│ │ 插补与轨迹规划
└──────────────┬───────────────────┘
│
┌──────────────┴───────────────────┐
│ 步进驱动扩展板 │ ← 驱动三个步进电机
│ ┌──────────┬──────────┬──────┐│
│ │ X轴驱动 │ Y轴驱动 │ Z轴驱动││
│ └──────────┴──────────┴──────┘│
└──────────────────────────────────┘
│
┌────────┼─────────┐
▼ ▼ ▼
上臂电机 下臂电机 底座旋转电机
(NEMA17) (NEMA17) (NEMA17)
通信方式
| 通信链路 | 协议 | 说明 |
|---|---|---|
| OpenMV → 运动控制板 | UART / GCode | 下发运动指令和查询状态 |
| 运动控制板 → 步进驱动 | 步进脉冲 + 方向信号 | 控制三轴运动 |
| 运动控制板 → 舵机 | PWM | 控制夹爪开合 |
| 运动控制板 → 气泵/电磁铁 | 开关量 | 控制末端执行器通断 |
传感器
| 传感器 | 功能 |
|---|---|
| 3 × 限位开关 | 各轴归零定位 |
| AD 按键 | 人机交互(示教/菜单选择) |
7.6 供电
| 组件 | 电压 | 预估电流 |
|---|---|---|
| 运动控制板(ESP32) | 5V(USB) | ~500 mA |
| 3 × NEMA17 步进电机 | 12V DC | ~2A(峰值) |
| 舵机(SG90/MG996) | 5V | ~500 mA |
| 气泵/电磁铁(选配) | 12V | ~1A |
| OpenMV H7 / H7 Plus | 5V(USB) | ~500 mA |